关于 D4PG 的疑问
1. sample efficiency 如此之低?
2. v_min = -20.0 and gamma = 0.99 也行?
D4PG 结果的优点
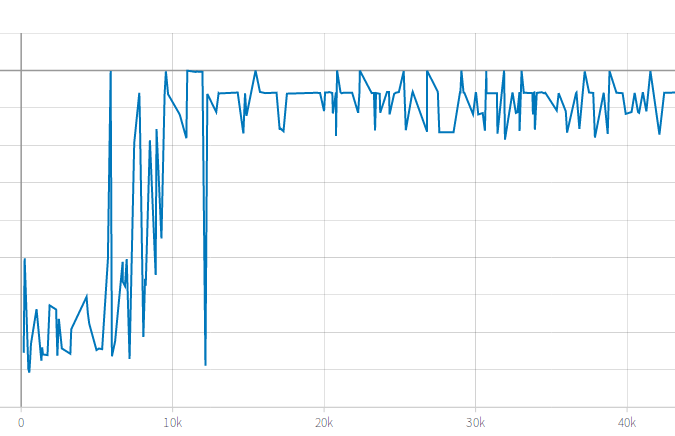
分值高且稳定
1. distributed 分布式
多个 actor (3)
priority experience replay
2. training times
Training Episode 10000
SAVE_CKPT_STEP = 10000 # Save checkpoint every save_ckpt_step training steps
noise process
NOISE_SCALE = 0.3 # Scaling to apply to Gaussian noise
NOISE_DECAY = 0.9999 # Decay noise throughout training by scaling by noise_decay**training_step
N_STEP_RETURNS = 5
DISCOUNT_RATE = 0.99
CRITIC_LEARNING_RATE = 0.0001
ACTOR_LEARNING_RATE = 0.0001
NUM_ATOMS = 51
STATE_DIMS = dummy_env.get_state_dims()
STATE_BOUND_LOW, STATE_BOUND_HIGH = dummy_env.get_state_bounds()
ACTION_DIMS = dummy_env.get_action_dims()
ACTION_BOUND_LOW, ACTION_BOUND_HIGH = dummy_env.get_action_bounds()
V_MIN = dummy_env.v_min
V_MAX = dummy_env.v_max
del dummy_env
3. batch normalization
USE_BATCH_NORM = False
墨之科技,版权所有 © Copyright 2017-2027
湘ICP备14012786号 邮箱:ai@inksci.com