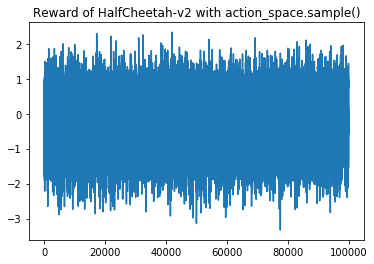
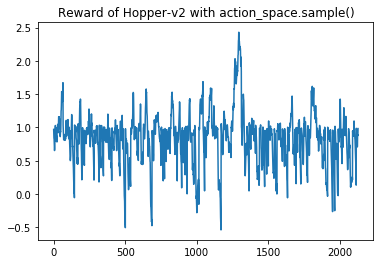
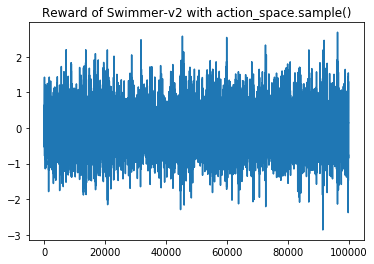
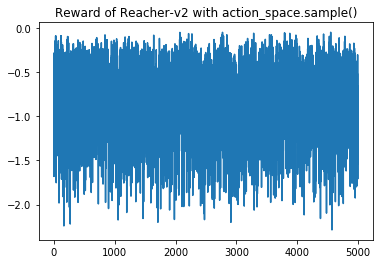
Gym continuous environments
奖励
|
env. name |
observation_space |
high |
low |
action_space |
high |
low |
max steps |
|
HalfCheetah-v2 |
Box(17,) |
inf |
-inf |
Box(6,) |
1 |
-1 |
1000 |
|
Hopper-v2 |
Box(11,) |
|
|
Box(3,) |
|
|
11,9,17 |
|
Swimmer-v2 |
Box(8,) |
|
|
Box(2,) |
|
|
1000 |
|
Reacher-v2 |
Box(11,) |
|
|
Box(2,) |
|
|
50 |
|
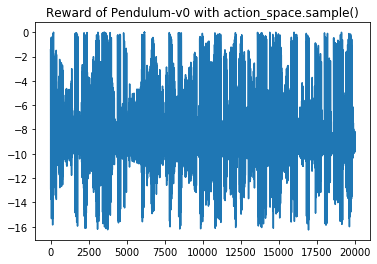
Pendulum-v0 |
Box(3,) |
[1., 1., 8.] |
[-1., -1., -8.] |
Box(1,) |
2 |
-2 |
200 |
|
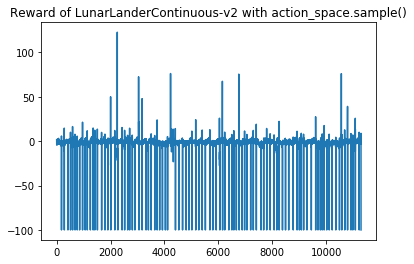
LunarLanderContinuous-v2 |
Box(8,) |
|
|
Box(2,) |
|
|
94,113,72 |
|
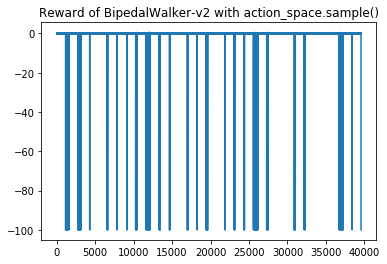
BipedalWalker-v2 |
Box(24,) |
|
|
Box(4,) |
|
|
73,101,60 |
|
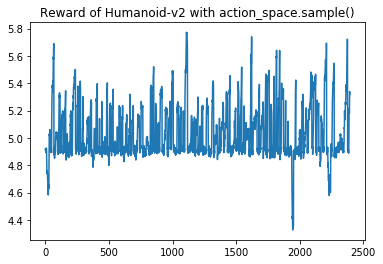
Humanoid-v2 |
Box(376,) |
|
|
Box(17,) |
0.4 |
-0.4 |
19,23,20 |
深度学习推荐
深度学习推荐
深度学习推荐
深度学习推荐
深度学习推荐
深度学习推荐
深度学习推荐
机器人推荐
文贝推荐
深度学习推荐
墨之科技,版权所有 © Copyright 2017-2027
湘ICP备14012786号 邮箱:ai@inksci.com